线性代数16-投影矩阵与最小二乘
Linear Algebra-投影矩阵与最小二乘-16
一、知识概要
本节聚焦于最小二乘法,深入探究上一节提及的投影概念。实际上,最小二乘法本质就是一种投影,其目的是使误差达到最小。同时,本节还涉及矩阵列空间与左零空间的相关知识,向量的投影就是在列空间中寻找距离最近的点,这与最小二乘法紧密相连。此外,还引出了标准正交向量组的概念。
二、投影矩阵回顾
上一节介绍了投影矩阵,其公式为:
在推导该公式时,,其中、是平面上的两个基,的列空间就是整个空间 。
投影矩阵与向量的乘积,可以理解为将向量投影到它在列空间中的最近一点上。这和上节课将向量投影到平面上的过程类似。基于此,有以下两个问题:
若在矩阵的列空间里,则:此时。因为本身就在的列空间中,就如同上节课中向量就在平面上,投影就是其本身。
- 证明过程:
- 由于在的列空间里,所以一定可以写成的形式。
- 将其代入投影矩阵可得:,根据矩阵乘法结合律,,而,所以,又因为,所以 。
- 证明过程:
若垂直于的列空间,则:此时,即没有投影。例如上节课中向量与平面垂直穿过的情况,此时向量在平面上没有分量,投影为 。
- 证明过程:
- 因为垂直于的列空间,所以垂直于的所有列向量,那么在左零空间中。
- 代入投影矩阵,由于在左零空间,所以,则 。
- 证明过程:
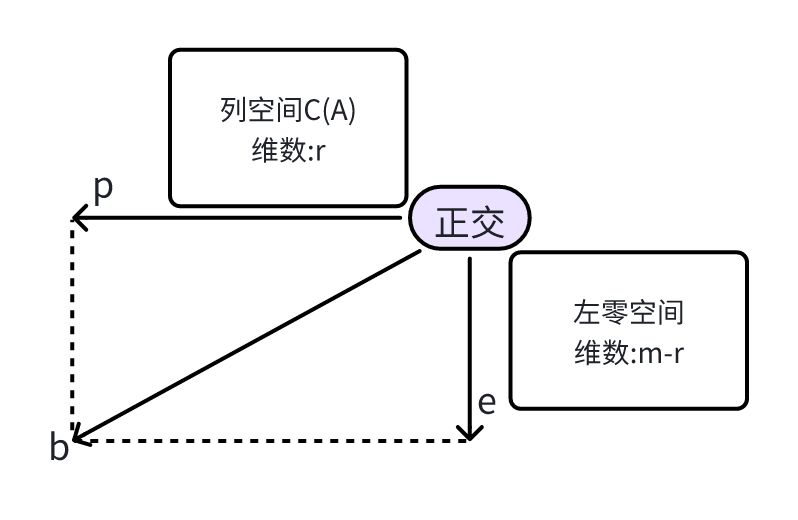
通过这两个问题可知,一个向量总有两个分量,一个在的列空间中,另一个垂直于的列空间。投影矩阵的作用就是保留列空间中的分量,去除垂直于列空间的分量。可以用公式表示这种关系,其中是投影矩阵作用于上得到的向量,是左零空间中的分量。如果用类似投影矩阵表示,有,,这里可以把也看作一个投影矩阵,它将向量投影到左零空间中。
三、最小二乘法
3.1 最小二乘解题
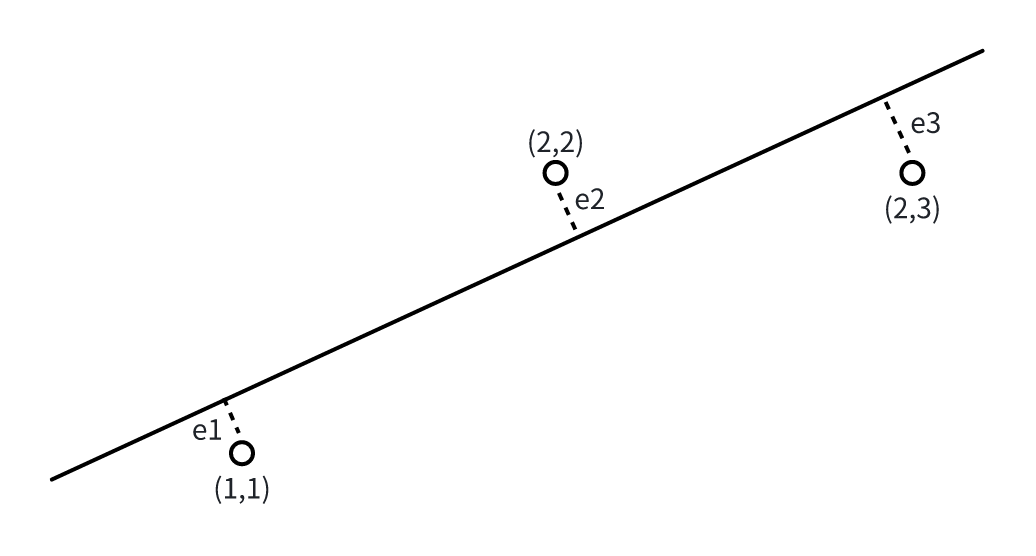
【例】继续探讨上节课的例子,求解过三个点、、拟合的直线方程。
- 列出方程:假设最优直线方程为,将三个点代入可得方程组:
将其转化为矩阵方程的形式为:
很明显,这三个点不共线,该方程无解。
- 计算误差并拟合:由于三点不共线,先计算直线与各点之间的误差(偏移量),用表示。为便于计算,研究它们的平方和 。从几何意义上讲,这个过程本质是将向量投影到的列空间中,也就是将三个点投影到满足方程条件的最近的一条直线上。
使用上节课介绍的方程来拟合直线。在这个例子中,,,,代入方程求解:
则方程变为,求解可得:
所以得到的直线方程为 。
- 检验:分别将、、三个点的横坐标代入拟合直线方程,可以得到拟合直线上各点对应的位置,即的位置。需要注意的是,以上能使用最小二乘法是因为没有误差过大的量。
3.2 性质讨论
上述问题也可以通过使误差最小来计算。将误差化为,从导数的角度,对和求偏导并求极值,也能求得拟合直线。
将误差向量记为,对应的投影向量记为(对应拟合直线上的值),有(为给定的点的实际值)。在本题中,,, 。由此可得到以下性质:
- 误差向量与投影向量垂直,即。
- 误差向量不仅垂直于,还垂直于列空间中的每一个向量。这些性质进一步验证了前文关于投影的相关介绍。
3.3 结论证明
在解方程过程中,用到了“如果矩阵各列线性无关,则矩阵可逆”这一结论,之前未给出证明,下面进行证明:
- 写出零空间方程形式,目的是寻找零空间内的向量 。
引入之前学过的结论:
- 如果矩阵可逆,那么其对应的零空间仅包含零向量。
- 对于列向量,表示求的长度。
- 若,则(是列向量) 。
证明过程:
- 将方程两边同时左乘,得到。
- 根据矩阵乘法的性质,则。
- 因为向量的内积,且向量的内积为 时,该向量为零向量,所以可推得。
- 又因为已知矩阵各列线性无关,根据线性无关的定义,若,则必为零向量。
- 综上,证得的零空间只有零向量,根据矩阵可逆的判定条件,若矩阵的零空间只有零向量,则该矩阵可逆,所以可逆。即证明了如果矩阵各列线性无关,则矩阵可逆。
四、标准正交基
这部分内容主要是为下节课做铺垫,相对较少,简单了解即可。
之前接触过的向量组,,,它们是正交的,并且还有特殊性质——都是单位向量,长度为 。基于此,引入“标准正交向量组”的概念,其中“标准”表示向量是单位向量。
同样属于标准正交向量组的还有,。
五、学习感悟
本节内容相互关联性强,最小二乘法与投影矩阵之间联系紧密,可以从多种角度进行理解。在学习过程中,记住将向量投影到列空间与左零空间的示意图非常重要,它有助于更牢固地掌握这部分知识。
 微信
微信 支付宝
支付宝