线性代数05-转置矩阵与向量空间
Linear Algebra-转置矩阵与向量空间-05
概要
本节我们再谈置换矩阵与转置矩阵,并介绍对称矩阵,之后便进入学习线代的关键所在:向量空间与子空间。
置换矩阵
回顾
所谓的置换矩阵 P,就是用来完成行交换的矩阵,更具体地说,是行重新排列了的单位矩阵。例如 I 就是一个置换矩阵,只不过 I 对矩阵没影响。
那么对于 n 阶矩阵来说,有多少个置换矩阵呢?答案是:n!种,也就是将单位矩阵 I 各行重新排列后所有可能的情况的数量。
置换矩阵的另一个优点就是可逆,因为置换矩阵各行还原后可以得到单位矩阵。而且对于置换矩阵 P,有,也就是。
这个性质其实很好理解,首先明确,P 是置换矩阵,因此 P 的每个列向量中只有一个分量是 1,其余分量均是 0。而既然要求,那就说明中每一行的行向量与中每一列的列向量的数量积为 1,也就意味着中每一行与中每一列中分量 1 出现的位置相同,也就是与沿对角线对称,所以。
置换矩阵的使用
在讲消元法的时候,主元位置为 0 是一件很让人头疼的事,这时就需要置换矩阵 P 来完成行交换,确保消元过程顺利进行。上节学习分解时,我们没有考虑要交换行的过程,如果我们想写出更普适的 LU 分解式的话,必须把行交换情况考虑进去,即:,先用行交换使得主元位置不为 0,行顺序正确,其后再使用 LU 分解。
转置矩阵
转置矩阵回顾
之前简单介绍过转置矩阵,即:
用符号来表示就是对矩阵以及矩阵中每一个元素,都有:
也就是说,转置矩阵中,行元素与列元素交换了,理解转置很简单。
对称矩阵
对称矩阵,顾名思义,就是主对角线两侧元素对应相等的矩阵。或者说,对于矩阵 A,如果有,那么矩阵 A 就是一个对称矩阵,如 。
那么我们如何获取到对称矩阵呢?很简单,矩阵与相乘得到的方阵一定是对称矩阵,因为我们从对称矩阵的定义来看,取,根据转置的运算规律,可知,所以有:
所以任何的,转置仍然是其本身,故称为对称矩阵。
向量空间与子空间
向量空间
首先明确“向量空间”的概念,它表示一整个空间的向量,但是要注意,不是任意向量的集合都能被称为向量空间。所谓的向量空间,必须满足一定规则,就是:该空间对线性运算(相加,数乘)封闭。类似:v->3v 或者 v, w-> v+w 运算,若得到的 3v 或者 v+w 都仍然在此空间中,则这个空间可称为向量空间。
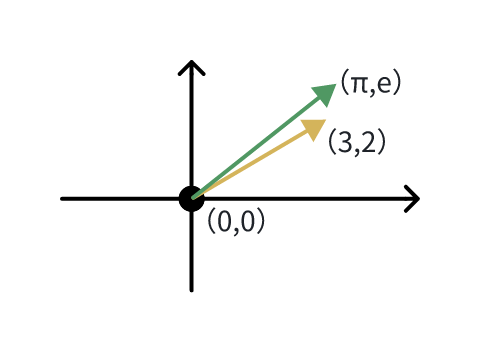
举个例子,就是一个向量空间,其中的向量均为二维实向量。在上就存在线性组合,我们举例说明:
均在的实数二维向量空间中,对它们做线性运算,得到的结果仍然在 空间中。
显然,的向量空间可以构成一个平面,即是图上的 xoy 平面。这个向量空间存在的关键在于上图中平面上任何向量都在向量空间中,尤其是零向量。因为线性运算是“数乘”“相加”,任何向量乘上 0 或者加上其反向向量后得到的都是零向量,所以它必然存在于所有向量空间中,这一点十分重要。
同样,推广到空间,中是三维的向量,每个分量均为实数,例如 ,这样的向量就在 空间中。
再进行推广,空间中包括所有的 n 维向量,每个列向量有 n 个分量,且分量均为实数。
再举一个不是向量空间的例子:
还是空间中,但是这次我们只取第一象限内的区域 D:
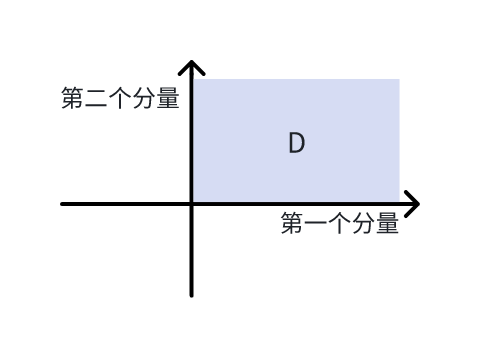
显然,这部分空间无法满足“线性组合仍在空间中”的要求,比如数乘运算时,随便取个负数,向量就会跑到第三象限去,脱离 D 空间范围内了。
子空间
上面的反例已经证明,在向量空间里随便取其一部分,很可能得到的不是向量空间。那如果我们取向量空间的一部分,构成的有没有可能是向量空间呢? 答案是有的,这样还能构成向量空间的部分我们称之为子空间,还是以为例:
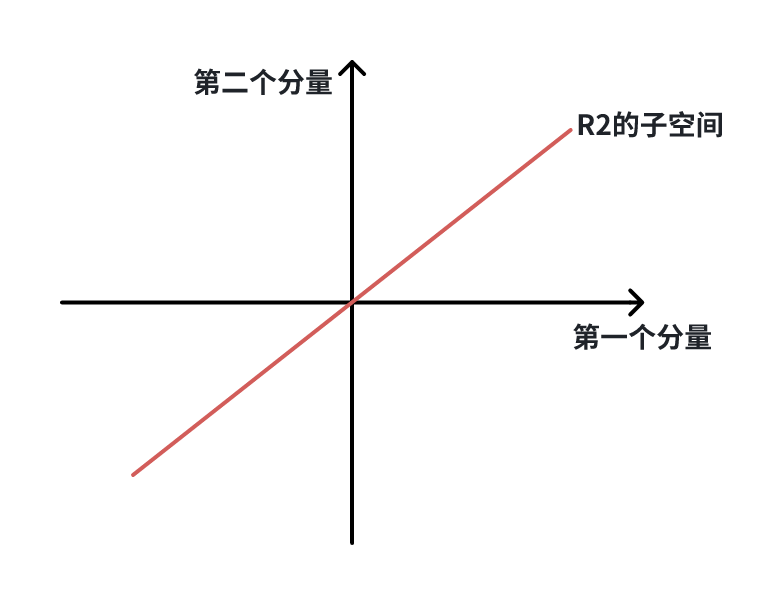
如图,整个坐标平面表示的就是原向量空间,而这条穿过原点的直线就是的子空间之一。检验一下这条直线上的任意向量,他们的“数乘”,“相加”运算结果全部仍在这条直线上,这就构成了一个子空间。而如果这条直线不过原点,那么零向量都不在这个空间中,就更别谈什么子空间了。
那空间中,还有没有其他的子空间呢?既然我们这么强调零向量,那就让它单独成一个空间就好了。记为 Z,其中之后一个零向量,它也是的子空间之一。
再稍微推广一下,的子空间就是如下三个:
- 穿过原点的平面;
- 穿过原点的直线;
- Z,原点;
列空间
上面介绍的子空间都是基于已知的图像来寻找的,接下来我们通过具体的矩阵来构造一个子空间,比如:列向量构造出的列空间。
我们以 为例。首先能看出来,各列向量均属于,而且由这两个向量张开的子空间必须满足“线性运算封闭”这一性质。也就是说以及它们的线性组合构成了一个 的子空间,我们称之为:列空间,记为 C(A)。
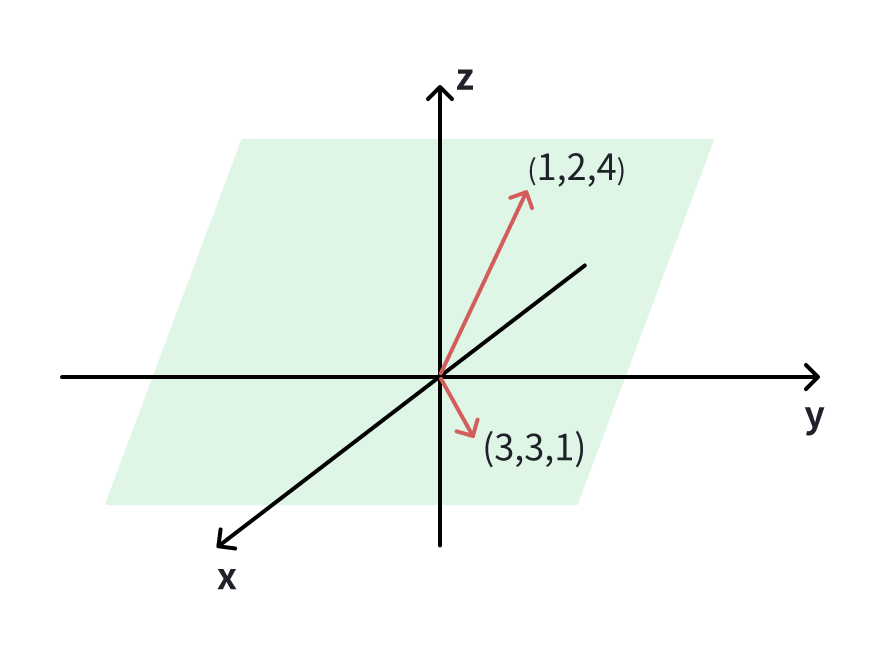
因为 不在同一条直线上,所以,这个列空间表现在图像上,就是一个过原点与这两个列向量的平面。
两个向量 以及它们的所有线性组合都在这个二维平面上,构成一个空间。这里需要我们好好理解,用教授的话说“情况下还可以作图,但是更高维的类似于情况你要怎么办?譬如求 空间中 5 个向量线性组合是什么样的?如果不共线,我们就可以类似地理解为一个十维空间中的五维平面之类的东西。”
这里还要注意列向量之间的性质,如果列向量之间就是共线的,那么其列空间就是一条过原点的直线。
学习感悟
这节介绍了向量空间和子空间,并由子空间引出了通过具体的列向量构成的空间—列空间。如何理解空间的概念非常重要,本节中对低维的空间做了图,目的是便于我们理解“空间”这一概念。
 微信
微信 支付宝
支付宝