线性代数15-子空间投影
Linear Algebra-子空间投影-15
一、知识概要
在上一节中,我们学习了正交的概念,理解了什么是正交向量和正交子空间。今天我们要把这个概念用起来,解决一个非常实用的问题:如何将一个向量投影到一个子空间上。
投影这个概念其实我们从初中几何就开始接触了——作垂线找投影。今天我们要做的,就是把这个几何直观推广到高维空间,并用矩阵的形式把它表示出来。通过投影,我们还能得到一个非常重要的应用:当方程组无解时,如何找到”最优”的近似解。这就是最小二乘法的核心思想。
让我们一步步来,从最简单的一维投影开始,慢慢推广到高维情况。
二、投影
2.1 简单的投影
先来看最简单的情况:向量在另一个向量上的投影。如下图所示,就是在方向上的投影,它可以表示为,其中是一个标量倍数。而向量就是与投影之间的误差向量。
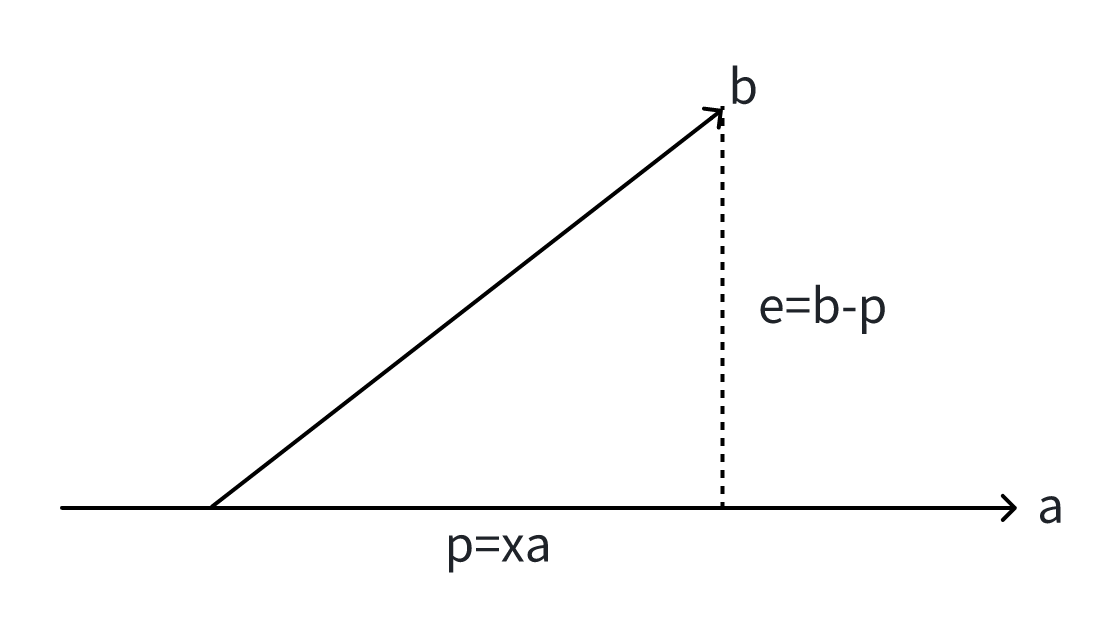
根据我们对投影的几何直观,误差向量应该与垂直,这是整个推导的关键。利用上一节学到的正交概念,两个垂直向量的点积为,因此:
现在我们来解这个关于的方程:
把代回到中,我们就得到了投影的表达式:
仔细观察这个表达式,我们可以把它重新排列一下:
看到了吗?投影其实是通过一个矩阵作用在原向量上得到的。这个矩阵我们称之为投影矩阵,即 ,其中:
这里需要注意一下维度:当是列向量时,是一个矩阵,而是一个标量(数字),所以整个表达式是合法的。在这种一维情况下,矩阵的秩为,而且是对称的。
投影矩阵有两个非常重要的性质,这两个性质在任何维度下都成立:
对称性:。证明很简单:因为 ,分母是数字,分子转置后形式不变,所以是对称矩阵。
幂等性:。从几何意义上很好理解:如果你对一个向量已经投影过一次得到,再对投影一次,结果还是本身,因为已经在方向上了。这两条性质是后续扩展投影概念的重要基础。
2.2 平面上的投影
理解了一维投影后,我们现在来看更一般的情况:将向量投影到三维空间中的一个平面上(这是一个二维子空间)。
假设平面由两个线性无关的向量和张成,那么平面上的任何投影都可以表示为和的线性组合:
如果令 ,,那么上式可以简洁地写成:
几何关系如下图所示:
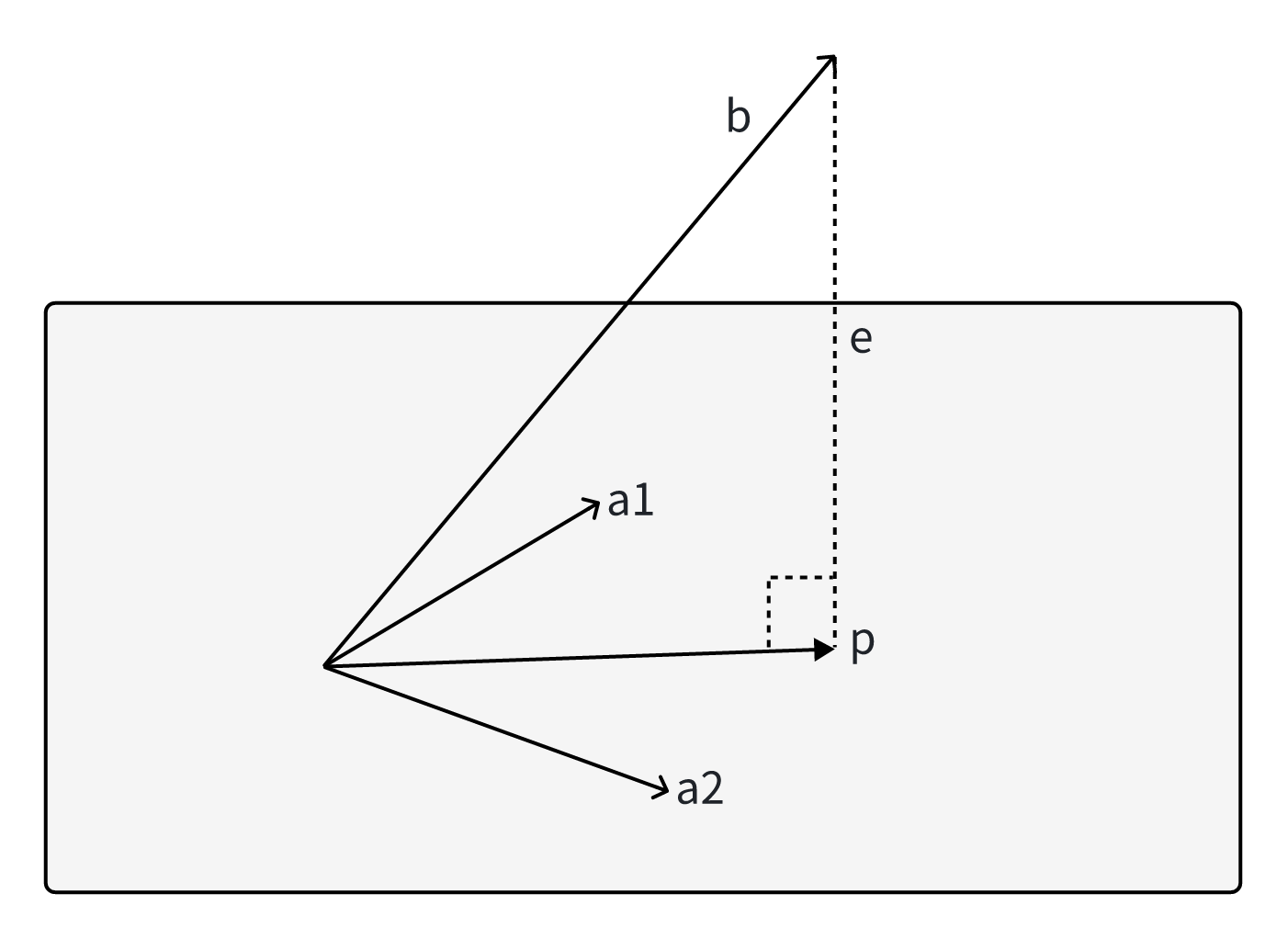
类比一维投影的思路,误差向量 应该与平面中的所有向量垂直,自然也就与基向量和都垂直。将代入垂直关系可得:
左边第一个矩阵正是,所以方程可以简化为:
你看,这个形式和一维投影非常相似!实际上一维投影就是只有一列时的特殊情况。
从这个方程我们还可以看出一点:误差在的零空间里。根据上节课所学,零空间与行空间正交,所以向量与的行向量正交,进而与的列向量、正交,这正好符合我们对误差向量的要求,完美验证了之前的结论。
接下来我们求平面上的投影矩阵。由,先化简得到:
这里需要特别注意:因为不一定是方阵,所以不能直接在两边左乘。但由于是由两个线性无关的基向量构成的矩阵,根据上节知识可知可逆,因此我们可以在两边同时左乘来解方程:
将代入,可得:
由此得到投影矩阵的表达式为:
这就是投影矩阵的一般情况,而前面计算的是投影矩阵的一维特殊情况。同样,也具有和这两个性质,其证明过程与一维情况类似,在此不再详述,读者可以自行验证。
让我们用一个流程图来总结整个投影的推导过程,这样更清晰:
flowchart LR
A[目标:将b投影到A的列空间] --> B[设投影p = Ax̂]
B --> C[误差e = b - p正交于列空间]
C --> D[Aᵀ(b - Ax̂) = 0]
D --> E[AᵀA x̂ = Aᵀb]
E --> F[x̂ = (AᵀA)⁻¹Aᵀb]
F --> G[p = A x̂ = A(AᵀA)⁻¹Aᵀb]
G --> H[投影矩阵 P = A(AᵀA)⁻¹Aᵀ]
三、最小二乘法初涉
前面学习的投影知识有着重要的实际应用,投影中的可以看作向量与子空间之间偏移量的大小,这为使用最小二乘法拟合直线提供了坚实的理论基础。
【例】求解过三个点,,拟合的直线方程。
- 列出方程:假设最优直线方程为,将三个点代入方程可得:
- 转化为矩阵方程并求解:将上述方程列成矩阵方程,我们会发现该方程无解——因为三个点不共线,找不到一条直线正好经过它们。
这时候投影就派上用场了。运用投影中讲到的方法,我们将原问题转化为求解,这个方程一定有解,而解就是我们要找的最优近似解。
这种方法的关键在于:原本无解的方程,经过投影处理后得到的可以求出最优解,从而实现将无解的方程转换为可求解的最优方程。最小二乘法在后续课程中还会详细讲解。
四、学习感悟
本节内容是上一节正交知识的延伸。借助正交概念计算投影,并利用投影与向量之间的偏差引入最小二乘法,从而解决方程无解时的最优解问题,实现直线拟合。这部分内容实际应用性较强,核心目的是求解,以获得最优解。
笔者认为,投影这个概念其实把前面很多知识点都串起来了:正交、子空间、零空间、列空间,这些概念在这里汇合到一起,给出了一个非常漂亮的结果——投影矩阵的一般表达式。在实际工程中,我们很少能遇到方程个数正好等于未知数个数、还能完美求解的情况,更多时候是观测数据很多,方程比未知数多,这时候最小二乘法就是我们的利器,而它的核心思想其实很简单:就是在子空间中找到离原向量最近的那个点,这个点就是投影。
 微信
微信 支付宝
支付宝